情報制御基礎の授業を通して、入力値を制御するため、コンピュータを使う場合の数値処理の基礎的な話として、信号の平滑化や差分について説明をしてきた。実際には、入力値を制御に利用する場合には、数学的バックグラウンドも必要となる。
制御工学の概要
以下に、制御工学ではどのようなことを行うのか、概要を述べる。
ここで紹介する制御理論は、古典制御理論と呼ばれる。
制御工学では、入力値と、何らかの処理を施し出力値
が得られるシステムで、どのように制御するかを考える。
例えば、電気ポットの温度制御をする場合、設定温度の値を入力値(x)とし、何らかの処理を行い、出力となるヒーターの電流を制御し、最終的には温度(y)が測定される。ヒーターは、設定温度(x)と温度計の値(y)の差に応じて電流量を変化させる。このように一般的な制御では、最終的な温度が入力に戻っている。このように目標値に近づけるために、目標値との差をとって制御することをフィードバック制御という。
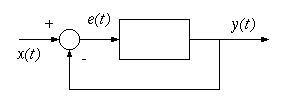
入力と出力で制御された波形の例を示す。
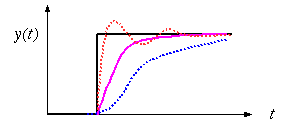
この波形では、黒のように入力値が変化した場合、それに追いつこうと出力が変化する。(1)理想的には、速やかに追いつく赤のように変化したい。しかし、(2)変化への制動が大きい過制動(青点線)では、目標値に追いつくまでに時間がかかる。(3)一方ずれに対して制御が激しいと目標値を追い越したり、増えすぎ分を減らしすぎたり変動する過制御(赤点線)となる。
PID制御
目標値、出力
、ずれ(偏差)
、制御量
とした時、基本的なフィードバック制御として偏差の使い方によってP動作,I動作,D動作がある。参考 Wikipedia PID制御
比例制御(P制御)
偏差に比例した制御(Kp は比例ゲイン)
積分制御(I制御)
偏差のある状態が長い時間続く場合、入力値の変化を大きくすることで目標値に近づけるための制御。(Ki は積分ゲイン)
微分制御(D制御)
急激な出力値の変化が起こった場合、その変化の大きさに応じて妨げようとする制御。(Kd は微分ゲイン)
PID制御
上記のI制御やD制御だけでは、安定することはなく、これらを組み合わせたPID制御を行う。
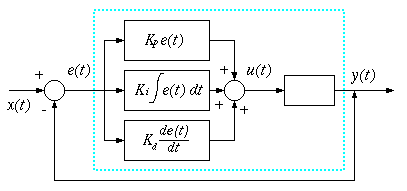
この中で、の値は、制御が最も安定するように調整を行うものであり、数値シミュレーションや、ステップ応答を与えた時の時間的変化を測定して調整を行う。