ロボットやドローンを動かすときに使われるモーターにはいくつかの種類がある。
直流モーター
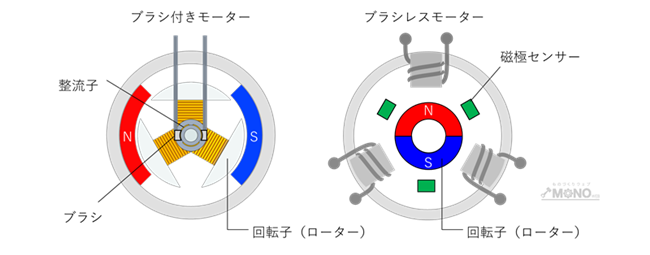
安価な直流モータは、以下のような構造をしており、外部に永久磁石と、内部に電磁石を配置し、内部の電磁石には整流子(ブラシ)を経由して電気が流れる。モータは回転するにあわせて、ブラシの接触部分が変化し電磁石が S極, N極が変化し回転する。

[FA Productsのページから引用]

[Tech Web]モーターの構造とは?|回転する原理や仕組み、広く利用される理由を解説
モーターを回すにはたくさんの電流が必要で、ハイパワーかつ高速にモーターを動かすようにすると、整流子のブラシでは接触したり離れたりする瞬間に、摩擦ですり減ったり、火花がでたりすることがある。
また、モーターの中身は単純な電磁石でありただの導線であるため、モータが止まっている状態とか回転が遅い状態では、大量の電流が流れる。このため、モーターが回転を始める状態では一時的に大量の電流が流れる可能性があり、回路の工夫が必要となる。
このため、モータに電圧をかける際には、パルス幅変調で電圧をかける時間を細かくすることで大量の電流が流れるのを制御する必要がある。

[ローム社PWM(パルス幅変調)・PFM(パルス周波数変調)制御とは]より引用
模型用サーボモーター(RCサーボ)
ラジコンのハンドルや、飛行機のラダーなどの角度の制御では、模型用サーボモーターがよく使われている。
模型用のサーボモーターの中には、以下の機能が組み込まれている。
- 角度を変化させるための直流モーター
- ホーンを力強く動かすためのギアボックス
- ホーンの角度を検出するための可変抵抗(ポテンションメーター)
- 角度により変化する可変抵抗両端の電圧と、制御用のパルス幅信号とを比較して、モータを正/逆回転制御する制御回路。
ホーンは、パルス幅に応じて角度が変化する。(PWM変調)

[PICマイコンでRCサーボを制御する]より引用
ブラシレスモーター
直流モーターは、電圧をかけるだけで動くという点で簡単な仕組みであるが、整流子の部分での摩擦や摩耗や大電流の場合の火花などが問題となる。
そこで、モーターの構造を、回転軸に磁石(磁力の強いネオジム系が使われる)、外側を複数の電磁石で囲み、電磁石のS極,N極のタイミングをうまく制御することで、回転させる。
[MONO WEB ブラシレスモータとは]より引用
ブラシレスモーターを回転させるためには、外部の複数の電磁石を、タイミングのずらしながら ON/OFF 制御する必要がある。このため、電子回路による波形制御が重要となる。

[ステッピングモーターのパルスと電流の関係]より引用
回転量の検出
モータを動かす場合、どの程度モーターが動いたか、回転速度や回転量を把握する必要がある。
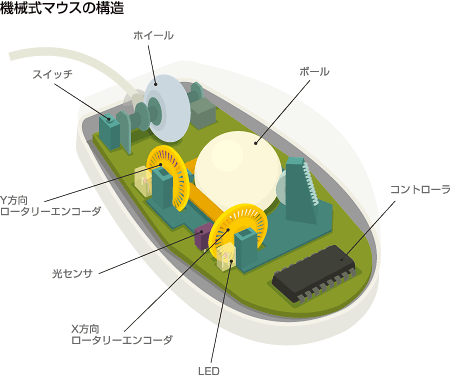
簡単なものでは、穴の空いた回転スリットを光が通過/途切れる回数をカウントするなどの方法が使われる。古いボールマウスなどは、これでマウスの移動量を検出している。LEDと受光素子を組み合わせた部品はフォトカプラ(フォトインタラプタ)と呼ぶ。
[Oriental motor エンコーダ]より引用
<[TDK 改めて知る機能性 – マウスの進化]
ブラシレスモーターでは、位相のずれた波形を正確に与えるための回転検出には、(ブラシレスモーターは回転体の内部が磁石のため)磁気センサーを用いる。