小型コンピュータを使った制御では、外部回路に指定した電圧を出力(D/A変換)したり、外部の電圧を入力(A/D変換)したりすることが多い。以下にその為の回路と動作について説明する。
D/A変換回路
ラダー抵抗回路によるD/A変換の仕組みを引用
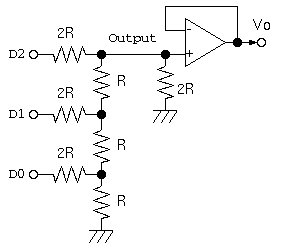
このような回路で、D0,D1,D2 は、デジタル値の0=0[V] , 1=5[V] であった場合、Output 部分の電圧は、(D0,D1,D2)の値が、(0,0,0),(0,0,1),…(1,1,1)と変化するにつれ、5/8[V]づつ増え、(1,1,1)で 5*(7/8)=4.4[V]に近づいていく。最後に、Output が出力によって電圧が変化しないように、アンプ回路を通す。
DCモータをアナログ量で制御しないこと
このように、電圧をコンピュータから制御するようになると、ロボットで模型用の直流モータの回転速度をこれで制御したい…と考えるかもしれない。
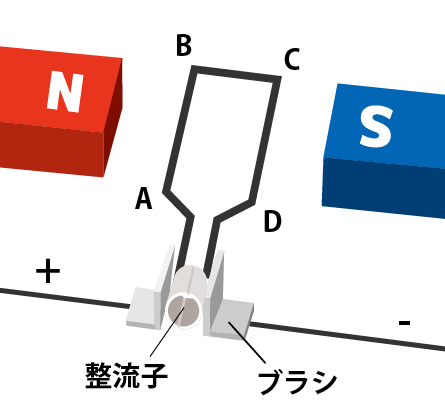
しかし、直流モータは、ブラシとコイル(電磁石)を組み合わせたものだが、モーターが回転しだす瞬間でみれば、コイルは単なる導線である。このため、小さい電流でゆっくりモータを回転させようとすると、たとえ小さい電圧でも導線(抵抗はほぼ0[Ω])には大量の電流が流れ、モータをスイッチングする回路は焼き切れるかもしれない。
PWM変調
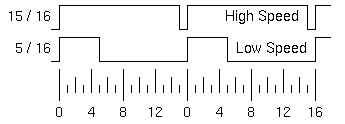
こういう場合には、PWM変調(Pulse Width Modulation) を行う。電圧の高さは一定で、高速回転させるときは長時間電圧をONにするが、低速回転させるときはONとOFFを繰り返し信号でONの時間を短くする。
このような波形であれば、低速度でも電流が流れる時間が短く、大量の電流消費は避けられ、モーターをまわす力も安定する。
A/D変換回路
D/A変換とは逆に、アナログ量をデジタル値に変換するには、どのようにするか?
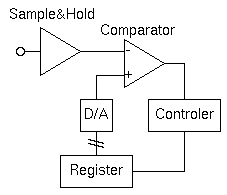
このような場合には、A/D変換回路を用いる。一般的な回路では、以下のような逐次比較型A/D変換を用いる。
この回路では、変換開始と共に入力値をサンプル保持回路でアナログ量を保存する。
その後、Registerの中のデジタル値を、D/A 変換回路でアナログ量に変換した結果を、比較器(Comparator)でどちらが大きいか判断し、その結果に応じて2分探索法とかハイアンドローの方式のように、比較を繰り返しながらデジタル値を入力値に近づけていく。
ハイアンドロー(数あてゲーム)
数あてゲームで、デタラメな0〜127までの整数を決めて、ヒントを元にその数字を当てる。回答者は、数字を伝えると、決めた数よりHighかLowのヒントをもらえる。
最も速い回答方法は…例えば決めた数が55だとすると
・初期状態 ??????? 0..127 ・64 - Low 0?????? 0..63 ・32 - High 01????? 32..63 ・48 - High 011???? 48..63 ・56 - Low 0110??? 48..55 ・52 - High 01101?? 52..55 ・54 - High 011011? 54..55 ・55 - Bingo 0110111 55確定どんな値でも、7回(27=127)までで当てることができる。
量子化と量子化誤差
アナログデータ(連続量)をデジタルデータなどの離散的な値で近似的に表すことを、量子化という。
量子化誤差とは、信号をアナログからデジタルに変換する際に生じる誤差のことをいう。
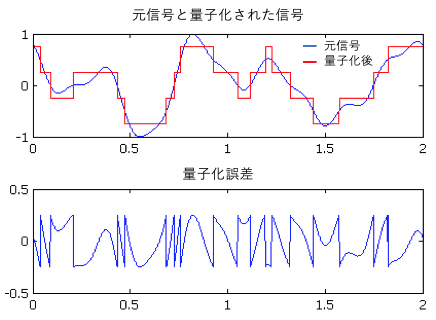
アナログ信号からデジタル信号への変換を行う際、誤差は避けられない。アナログ信号は連続的で無限の正確さを伴うが、デジタル信号の正確さは量子化の解像度やアナログ-デジタル変換回路のビット数に依存する。
偶然誤差
アナログ信号がA/D変換回路に入るまでに、アナログ部品の電気的変動(ノイズ)が原因で値が変動することもある。ノイズが時間的に不規則に発生し、値が増えてしまったり減ってしまったり偶然に発生するものは偶然誤差という。偶然誤差を加えると相殺されてほぼ0になるのであれば、統計的な手法で誤差の影響を減らすことができる。
なぜデジタル信号を使うのか
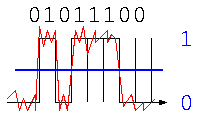
コンピュータが信号処理でなぜ使われるのか?例えば、下の信号のように、電圧の低い/高いで0/1を表現したとする。
ノイズが混入しづらい
このデータ”01011100″を通信相手に送る場合、通信の途中でノイズ(図中の赤)のような信号が加わった場合、アナログ信号では、どれがノイズなのか判別することはできない。しかしデジタル信号であれば、真ん中青線より上/下か?で判別すれば、小さいノイズの影響は無視して、元どおりの”01011100″を取り出せる。この0か1かを判別するための区切り(図中青線)は、しきい値と呼ばれる。
ノイズを見つける・治す
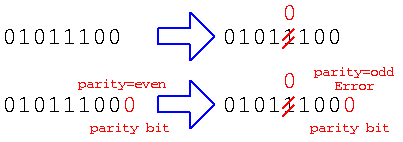
また、”01011100″のデータを送る通信の途中で、しきい値を越えるような大きなノイズが混ざって、受信したとする。この場合、単純に受け取るだけであれば、”01010100″で間違った値を受け取っても判別できない。しかし、データを送る際にパリティビット(偶数パリティであれば全データの1の数が偶数になるように)1ビットのデータを加える。このデータを受け取った際に、ノイズで1ビット反転した場合、1の数が奇数(3個)なので、ノイズでビット反転が発生したことがわかる。これをパリティチェックと言う。
このように、デジタル信号を使えば、しきい値を越えない程度のノイズならノイズの影響を無視できるし、たとえ大きなノイズでデータに間違いがあっても、パリティチェックのような方法を使えば間違って伝わったことを判別できる。
パリティチェックは、元のデータに1bitの信号を追加することで誤り検出ができるが、2bit同時に変化してしまうと誤りを見つけられない。そこで、元データにさらに多くのbit情報を追加すると、1bitの間違いを元に戻すようにもできる。誤り検出・訂正
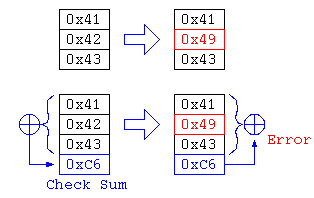
複数のデータを送る時には、送る前に送るデータのデータの合計値を、チェックサムとして付加して送る。データを受信した時に、合計値とチェックサムが違えばノイズでデータが正しく送ることができなかったことを検出できる。
電子回路で制御するかコンピュータで制御するか
これ以外にも、デジタル信号にする理由がある。
アナログ回路(電子回路)で制御しようとすると、抵抗やコイルやコンデンサといった受動素子が必要となるが、その中でもコイルは小型化がしづらい部品で、制御回路全体の小型化が難しい。大量生産ができるような回路なら小型化ができるかもしれないが、多品種少量の生産物では小型化のための開発費用の元がとれない。しかし、大量生産された安価な小型コンピュータで制御すれば、制御回路全体の小型化も可能となる。
また、電子回路の特性を調整するには、抵抗などの部品をはんだ付けをしながら部品を交換することになるかもしれない。しかしながら、アナログ信号をデジタル信号にしてしまえば、ノイズを減らすための平均化処理などは計算で実現できるし、特性を変化させるための調整もプログラムの数値を変更するだけで可能となる。