歯みがきロボコン工作教室
今年は、プッシュリベットを多用して、子供中心で作っても、早く組み立てができました。

歯みがきロボコン工作教室マニュアル
例年、福井県歯科医師会さん主催で、お手伝いしている 歯みがきロボットコンテストでの夏休みの工作教室を明日に控え、 組み立てマニュアルを作成。

歯みがきロボコン2015
例年、ロボコン車体の写真ばかりですが、知り合いの方が私の解説風景を撮ってくれました。(^_^)
福井テレビの看板アナの坂本さんは、何度か歯みがきロボコンでお隣でしたが、私の素人解説の中途半端な話しを盛り上げる話でつないでいて、頭の回転が速くないとできない仕事で、流石……です。

歯みがきロボコンの車体
明日の歯みがきロボコンに参加予定の車体、最終調整かな。

歯みがきロボコン親子工作教室
恒例の、10/4(日)に予定されている、歯みがきロボコンのための親子工作教室が8/8に開催されました。

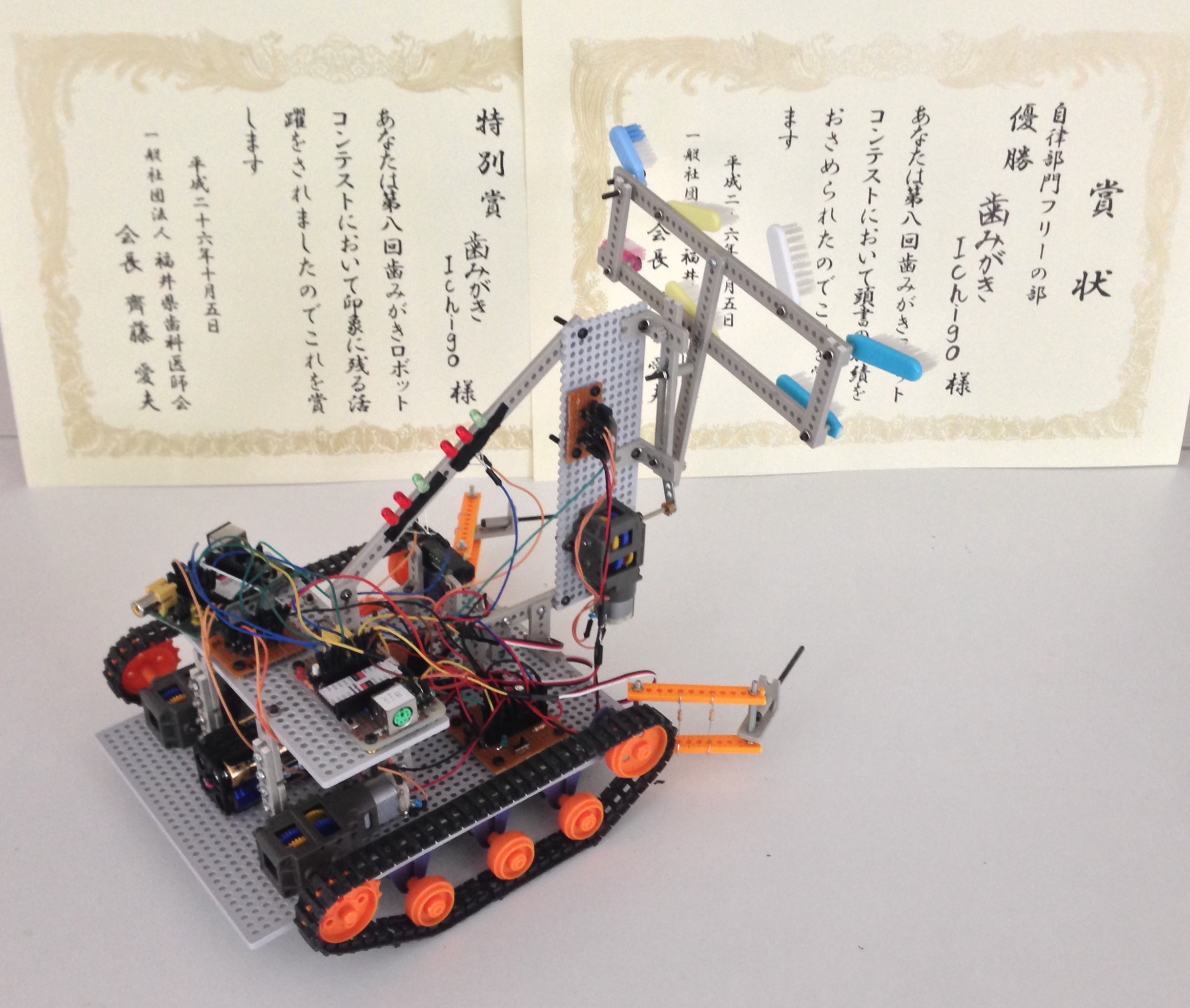
歯みがきロボコン第8回-自律フリーの部優勝
福井県歯科医師会さんによる歯みがきロボコン、 電子情報工学科でも運営などにも協力していますが、 子供の歯みがき啓蒙とロボット制御技術が歯科衛生に反映されることを 目指して開催され、今年が第8回大会となりました。
自律フリーの部で優勝
4EIでは、創造工学演習のなかで様々なコンテスト応募を目標に、 チームでものづくりを行いましたが、上出君、岩坂君、告吉君、篠地君 にて車体やプログラムを作っての参加でした。
車体制御には、子供の教育向けに作られたIchigoJam(jig.jp福野氏)を2個使って動かしています。
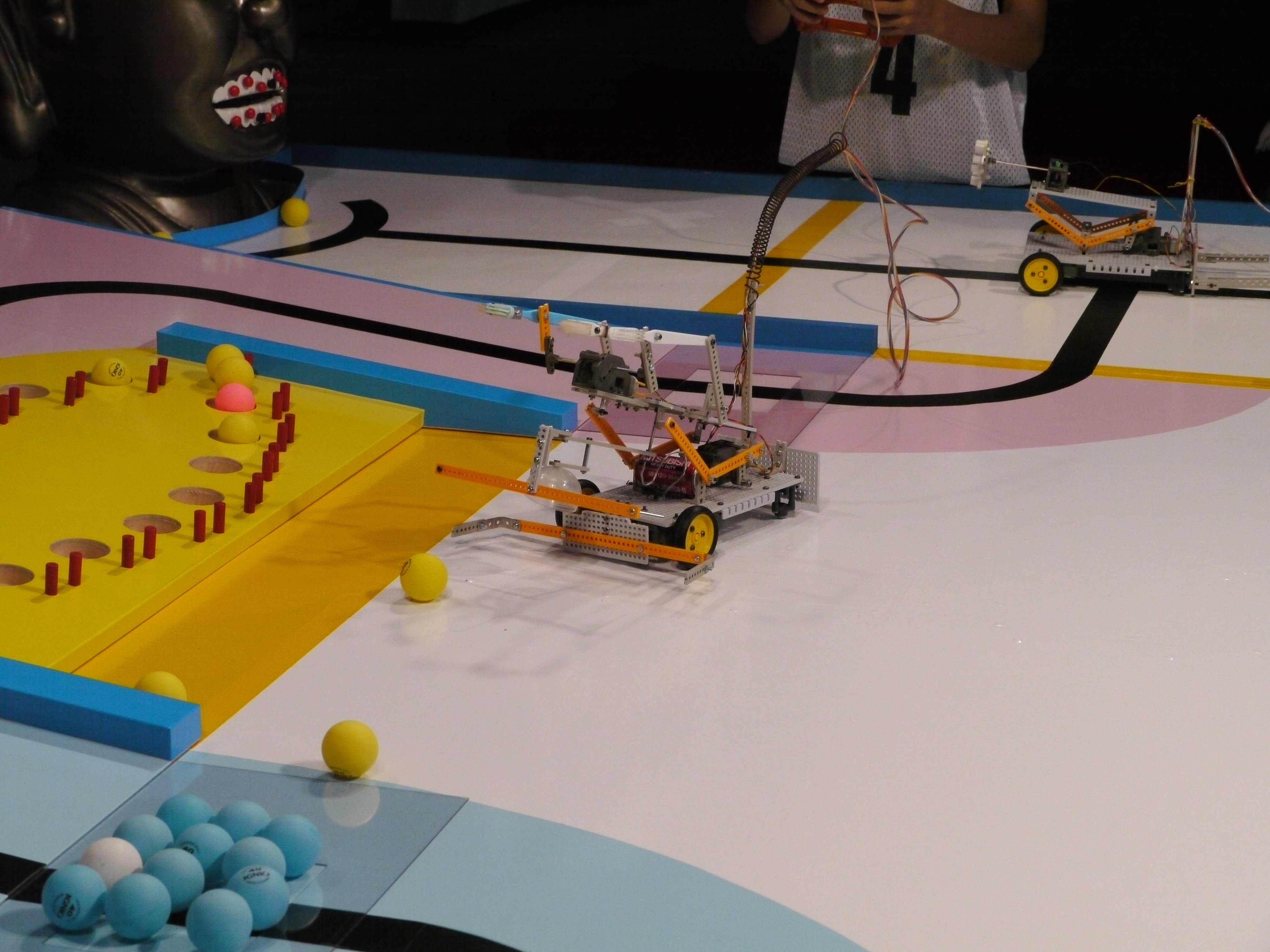
試合では、ゆっくりとした動きながら、着実に大仏模型に辿り着き、 歯みがき対象の虫歯に模したマグネットを取り除きました。 さらに、コース中央部の対戦フィールドでは、 薬にみたてたピンポン球を、歯の形に並んだ穴の所に流し込みます。接戦を繰り返しましたが、無事に優勝となりました。
また、福井県歯科医師会の方からは、「通常のロボット教材などを用いず、モータ制御回路などから機体を作った」ということで、 特別賞も頂きました。
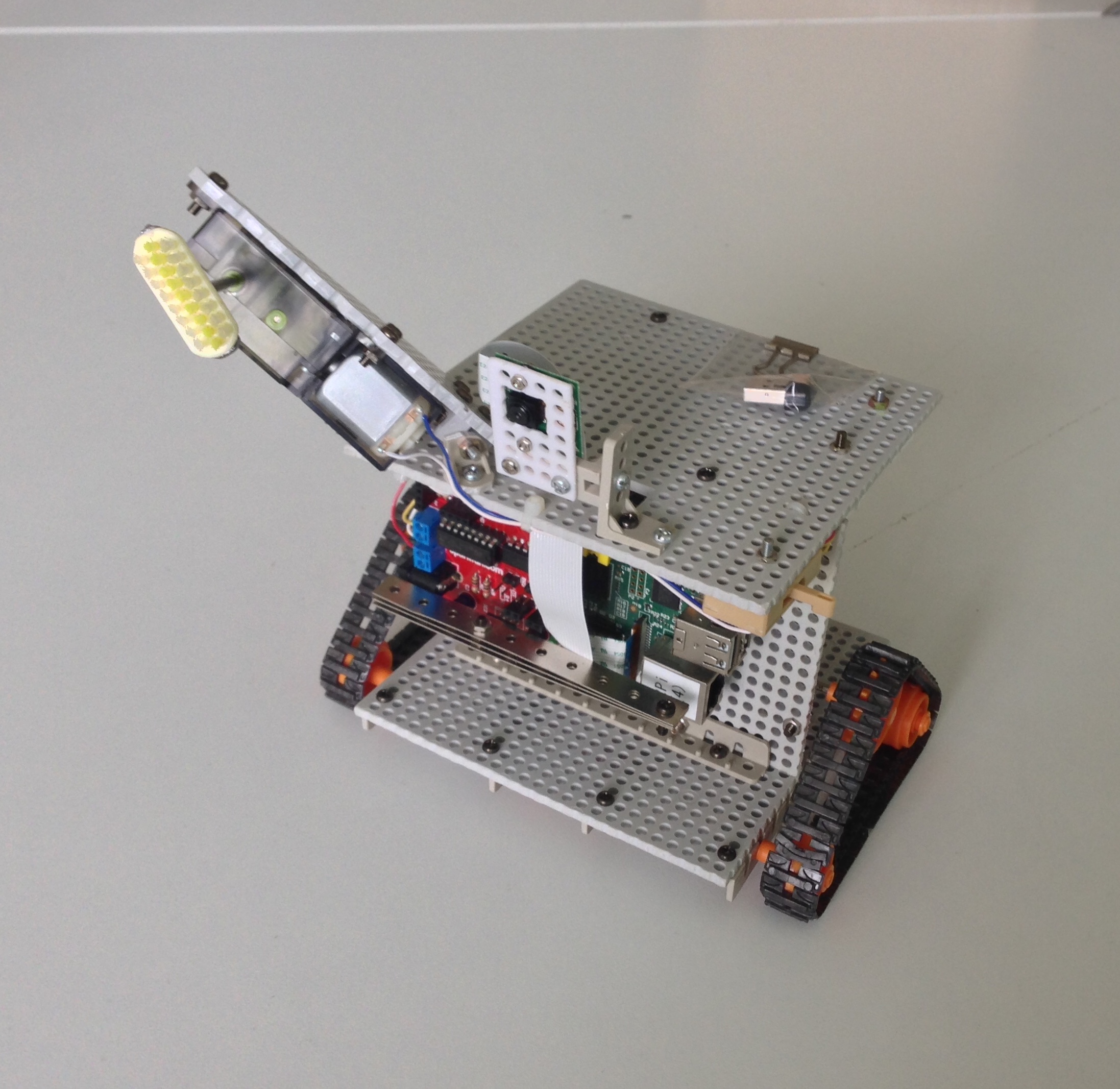
Raspberry-Pi + OpenCV + ファジー制御
斉藤卒研室からは、制御にRaspberry-Piとカメラを使った、 画像処理によるライントレースのロボットも参加しました。
画像処理ライブラリには OpenCV を用い、処理性能の問題から、 画像上の20点ほどの色・輝度情報を使っています。
動作の制御には、ファジー制御の考えを取り入れましたが、 カメラの画角が狭いため、ライントレースの線と、ブラシ部分の処理の両立が難しく、残念ながらうまく動きませんでした。
2014年歯みがきロボコン(小学生の部)の車体
この数年、福井県歯科医師会さんとの「歯みがきロボットコンテスト」の運営の 協力をしているなか、小学生・リモコンの部に参加する子ども向けの 夏休みの工作教室の準備を始めた。
しかし、今まで使ってきた 『楽しい工作シリーズ No.170 リモコンロボット製作 クローラータイプ (70170)』 が作成中止になり、入荷ができないとのことであった。 そこで、今年は改めて違う工作セットで作ることとなった。 キャタピラタイプのロボット製作セットでは、部品が足りないので、 別のパーツと組み合わせ、ひとまず試作。
夏休みの親子工作教室の2~3時間で作る (といってもリモコン・ギヤボックスなどは先に作っておく)必要があるから、 シンプルな構成とした。
第7回歯みがきロボットコンテスト
9/22(日)に勝山越前大仏にて、歯みがきロボットコンテストが開催され、 電子情報工学科では、5EI渡辺君,4EI金巻君が自律部門で参加しました。
残念ながら自律部門では、入賞できませんでしたが、以前から歯みがき ロボコンに参加していた1年生の学生さんが、 リモコン部門で優勝となりました。

Raspbianでサーボモータ制御
Raspberry Pi に Debian を入れてみたけど、USB-WiFiもつなげると、ほんと小さいけど ちゃんとしたサーバだわ…(^^; んで、最終的には画像処理系のロボットを組めればいいなということで、 その一環としてサーボモータを動かしてみた。
といっても、サーボモータでググって見つかった記事を動かしただけ。 GPIOポートに、ジャンプワイヤを接続するためのコネクタを作り、 上記記事の servod を動かして、以下のコマンドで簡単に動く。
$ for i in $(seq 50 20 240) $(seq 220 -20 50) do echo 0=$i > /dev/servoblaster sleep 1 done
ただ、参考にした ServoBlaster だけど、kill で servod を殺すと、 時々OSが異常停止してしまう。必要に応じてデーモンを動かし止めたりは不安定。
また、ServoBlaster で今回使用したサーボモータでは、 50以下の値や240以上の値を指定すると、サーボモータのポテンションメータの特性が 不安定なのか、 速度を変えてもいないのに、ジリジリという音がして角度を制御しようとしている様子。 ということで、50〜240の範囲で使う必要がありそう。
第6回歯みがきロボットコンテストに参加
第6回目となった福井県歯科医師会主催の歯みがきロボットコンテストですが、 運営や審判での協力と、4EI学生が選手として参加しました。
なお、このコンテストの模様は、10/7(Sun) 16:55 より放送を予定しています。
4EI学生も参加
この大会には、4年電子情報から、 リモコン部門(一般の部)に青池君,市橋君,川原君,山口君のグループと、自律部門(一般の部)に山腰君が参加しました。残念ながら、対戦では勝ち残ることはできませんでしたが、 前期の創造工学演習で作っていた作品を改良した車体にて、頑張ってくれました。